


的要害元件和接口,具有操控精度高、呼应速度快、输出功率大、结构紧凑等许多长处,已被大范围的运用于军事工业和其他工业操控范畴。伺服阀调试进程作为整个出产周期的终究环节,其要害环节质量操控关于确保伺服阀动、静态功能,提高作业稳定性和可靠性具有十分重要的含义。
电液伺服阀是电液伺服操控办理体系中的重要操控元件,在体系中起着电液转化和功率放大效果,它能将小功率的电信号转变为阀的运动,以此来完成对液压伺服体系执行器的流量以及压力操控[1]。
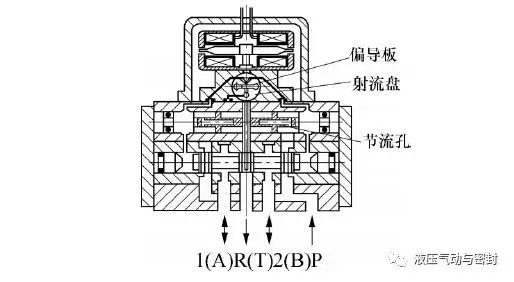
以在工程范畴大范围的运用的两级电液伺服阀为例,伺服阀一般由力矩马达、前置级液压放大器和功率级滑阀组成。图1和图2分别为喷嘴挡板型、偏导射流型电液伺服阀原理图。力矩马达由永久磁铁、导磁体、线圈及绷簧管、衔铁、反应杆、挡板等组成,反应杆小球插在阀芯中心的槽内;前置级液压放大器由节省孔、喷嘴(或射流盘)、回油阻尼器等组成。
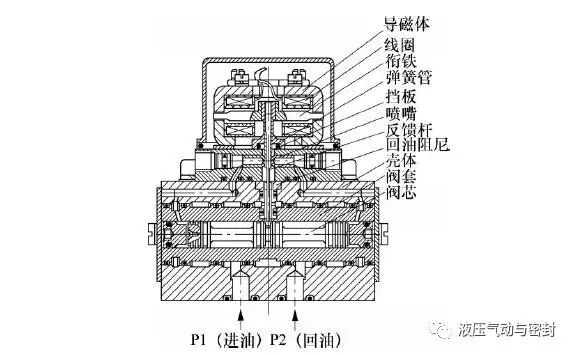
当线圈输入操控电流信号时,发生电磁力矩,使衔铁带动与其刚性联接的挡板发生偏转。两喷嘴腔压差改动时,阀芯即在压差驱动下效果,带动小球运动使弹性反应杆变形,然后向衔铁组件施加一个反应力矩,直到这个反应力矩与力矩马达的电磁力矩平衡,衔铁停留在某个相应的偏转角上。此刻反应杆的变形使挡板被部分地拉回中位,终究阀芯的驱动力与液动力平衡,阀芯停留在相应的位移上,此刻伺服阀输出一个对应的流量,完成了由操控电流对输出流量的操控[1]。
伺服阀作为高精度、高灵敏度的液压操控元件,要求具有较好的静态和动态特性及稳定性,而伺服阀的结构杂乱性,也决议了调试进程的精细化,为了可以更好的确保伺服阀功能满足要求,需要在调试进程中对影响整阀动、静态功能的要害环节进行辨认并加以操控,伺服阀调试进程中的要害环节主要有如下几点。
现在航天运用的电液伺服阀,为习惯航天类型重量轻、装置空间小、作业环境恶劣的需求采纳集成、紧凑的结构设计,其间节省孔、射流盘等中心组件尺度小,具有精细微小孔和微小型腔结构特征,如图3、图4所示,尺度一般在0.10~0.80mm之间;阀套类零件则为精细深孔且具有通油环槽、密封槽结构,如图5所示;壳体类零件则多为形状杂乱的异形槽、盲孔、斜孔、阶梯孔等,如图6所示。
没有了